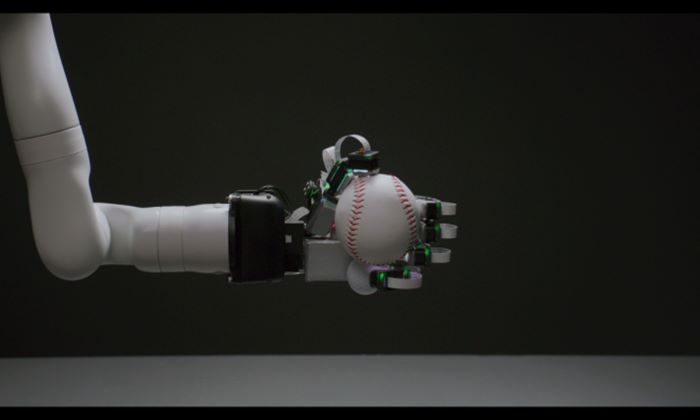
Çinli tədqiqatçılar yaxın günlərdə tam əl səviyyəsində yüksək dəqiqlikli toxunma hissiyyatı ilə tam hərəkət qabiliyyətini bir araya gətirən dünyanın ilk robot əl sistemini – F-TAC Hand adlı qurğunu inkişaf etdiriblər. Bu yenilikçi dizayn sayəsində F-TAC Hand insan əlinin funksiyasını təqlid edə bilir: o, təmasdakı dəyişiklikləri real vaxtda hiss edir və ani uyğunlaşmalar edərək qeyri-müəyyən mühitlərdə robotun sabit fəaliyyətini əhəmiyyətli dərəcədə artırır.
Azmedinfo.az-ın tərcüməsində təqdim olunan və "Nature Machine Intelligence" adlı nüfuzlu beynəlxalq elmi jurnalda dərc olunan məqalədə tədqiqat qrupunun verdiyi məlumata görə, bu nailiyyət insan zəkasının mahiyyətinə dair anlayışları dərinləşdirir və yeni nəsil süni intellekt sistemlərinin inkişafı üçün mühüm elmi perspektivlər açır.
Birgə tədqiqat qrupu Pekin Universiteti, Pekin Ümumi Süni İntellekt İnstitutu və digər elmi qurumların alimlərindən ibarətdir.
İnsan əli 27 sümük və 34 əzələdən ibarətdir, bu da ona 24 dərəcəlik sərbəstlik verir. Bu mürəkkəb quruluş və son dərəcə dəqiq funksionallıq sayəsində insan əlini öyrənmək, "bədənlənmiş zəka" və robot texnologiyaları sahəsində qabaqcıl bir tədqiqat mövzusudur.
Alimlərin izahına görə, insan əlinin obyektləri tutarkən iki əsas qabiliyyəti aktivləşir: toxunma hissiyyatı və hərəkət funksiyası. Keçmişdə bu iki qabiliyyətin birləşdirilməsi robot texnologiyasında ən çətin problemlərdən biri hesab olunurdu.
Araşdırmanın əsas müəllifi, Pekin Universitetinin Süni İntellekt İnstitutunun doktorantı Zhao Zihang bildirib:
“İnsan toxunma sistemi iki əsas komponentdən ibarətdir: dəridə sıx yerləşən toxunma sensorları və beyində sensor məlumatlarını analiz edən ixtisaslaşmış neyroprosesslər. Bizim F-TAC Hand bu sistemi təqlid edir – altı fərqli konfiqurasiyada yerləşdirilmiş 17 yüksək dəqiqlikli sensor inteqrasiya olunub. Sensorlar eyni zamanda həm hissedici, həm də struktur element kimi fəaliyyət göstərir. Bu da elastikliyi itirmədən görünməmiş səviyyədə toxunma örtüyü təmin edir.”
Tədqiqatın digər müəllifi və birgə birinci müəllifi, Pekin Ümumi Süni İntellekt İnstitutunun doktorantı Li Yuyang qeyd edib ki, robot əlindəki oynaqların qeyri-adi elastikliyi idarəetmə alqoritmləri üçün ciddi çətinliklər yaradıb.
“Bu problemi həll etmək üçün biz insanvari tutma strategiyalarını yaratmağa qadir bir alqoritm hazırladıq. Ehtimallar modelinə əsaslanan bu alqoritm insan hərəkətlərinə çox yaxın olan 19 ümumi tutma modelini təqlid edə bilir.”
Li əlavə edib ki, F-TAC Hand-in adaptiv zəka mexanizmi də nəzərəçarpacaqdır:
“Eyni anda bir neçə obyekti tutmaq bu robot əl üçün çevikliyi qiymətləndirmək baxımından vacib sınaqdır. Çünki bu, bir obyekti tutmaqdan daha çətindir. Tək bir obyekt iki barmaqla da tutula bilər, lakin çox obyektin tutulması üçün tam əl səviyyəsində təmasın hiss edilməsi və hərəkət strategiyalarının daim tənzimlənməsi tələb olunur.”
Tədqiqat qrupunun bildirdiyinə görə, praktiki testlər göstərib ki, robot əl istənməyən maneə ilə qarşılaşdıqda, problemi cəmi 0.1 saniyəyə müəyyən edir və alternativ həllə keçir. Bu texnologiyanın effektivliyini yoxlamaq üçün 600 tutma testi keçirilib. Nəticələr göstərib ki, toxunma hissiyyatı olmayan ənənəvi robot əllərlə müqayisədə F-TAC Hand-in uğur nisbəti 53.5%-dən 100%-ə yüksəlib.
Araşdırmanın aparıcı müəlliflərindən biri, Pekin Universitetinin Süni İntellekt İnstitutunun dosenti Zhu Yixin bildirib:
“Bu tədqiqat təkcə texniki irəliləyiş deyil – o, eyni zamanda zəkanın təbiətinə dair yeni baxış bucağı təqdim edir. F-TAC Hand-in uğuru göstərir ki, zəngin hissiyyat imkanları maşın zəkanın inkişafında da həlledici əhəmiyyətə malikdir.”
Zhu əlavə edib ki, gələcəkdə onlar toxunma hissiyyatını robotların idarəetmə sistemləri ilə daha dərindən inteqrasiya edərək daha ağıllı və çevik qarşılıqlı təsir modelləri üzərində işləməyi planlaşdırırlar. Bu da ümumi süni intellektin təməlini qoymağa kömək edəcək.
“Bu araşdırma ilə biz sadəcə robototexnika texnologiyasını deyil, eyni zamanda zəkanın mahiyyətini daha dərindən anlayırıq. Bu nəticələr növbəti nəsil süni intellektin inkişafına istiqamət verəcək və bədənlənmiş zəkanın sənayelərarası tətbiqini sürətləndirəcək. Beləliklə, bu texnologiya Çinin iqtisadi və sosial inkişafına da yeni məhsuldar qüvvələr gətirəcək,” – deyə Zhu yekunlaşdırıb.


-
Qazaxıstanlı mütəxəssislər Koordinasiya Mərkəzinin fəaliyyəti ilə tanış olublarƏn çox oxunanlar17 İyul 2026524
-
Azərbaycanlı alimlərin iki elmi araşdırması Avropa Pediatriya Assosiasiyasının konqresində təqdim edilibƏn çox oxunanlar16 İyul 2026190
-
Səhiyyə Nazirliyi və QHT Agentliyi qrant müsabiqəsi elan edəcəkƏn çox oxunanlar14 İyul 2026170
-
Piylənmə ilə mübarizədə dünya təcrübəsi və ölkəmizdəki mövcud vəziyyətƏn çox oxunanlar18 İyul 2026166
-
Həkim qəbuluna onlayn növbə yalnız “mygov” tətbiqi vasitəsilə təmin edilirƏn çox oxunanlar19 İyul 2026158
-
Ekspert: Öd daşı diaqnozu hər zaman əməliyyat demək deyilƏn çox oxunanlar18 İyul 2026152
-
Azərbaycan-Rusiya səhiyyə əməkdaşlığı və tibb təhsili müzakirə olunubƏn çox oxunanlar14 İyul 2026134
-
Dövlət təltiflərinə layiq görülmüş tibb işçilərinə orden və medallar təqdim olunubƏn çox oxunanlar16 İyul 2026124
-
Qoturluq xəstəliyi necə yayılır? – Ekspertdən mühüm tövsiyələrƏn çox oxunanlar20 İyul 2026122
-
Alimlər aqressiv beyin şişlərinə qarşı qızıl nanohissəciklərinə əsaslanan yeni üsul hazırlayırlarƏn çox oxunanlar19 İyul 2026112
-
Meyit donordan üçüncü uşaqlıq köçürülməsi uğurla həyata keçirilibƏn çox oxunanlar21 İyul 2026108
-
Ümumdünya Beyin Günü - Yaddaşı qorumaq və demensiya riskini azaltmaq üçün 6 təsdiqlənmiş üsulƏn çox oxunanlar22 İyul 2026108
-
Gənc Endokrinoloqlar Qrupu – AGEQ fəaliyyətə başlayırƏn çox oxunanlar23 İyul 202676
-
Düşənbədə səhiyyə xidmətlərinin keyfiyyəti və pasiyent təhlükəsizliyi üzrə ÜST Avropa Məktəbi keçirilibƏn çox oxunanlar23 İyul 202668




